- Main collaborators: H. Henrik Ehrsson, Wei Ji Ma, Heather Iriye
- Keywords:
Multisensory integration, Body ownership, Self-body perception, psychophysics, comoutational approach, neuroimaging. - Laboratory: Neuroscience dept, Karolinska Institute, Sweden (2017-2021)
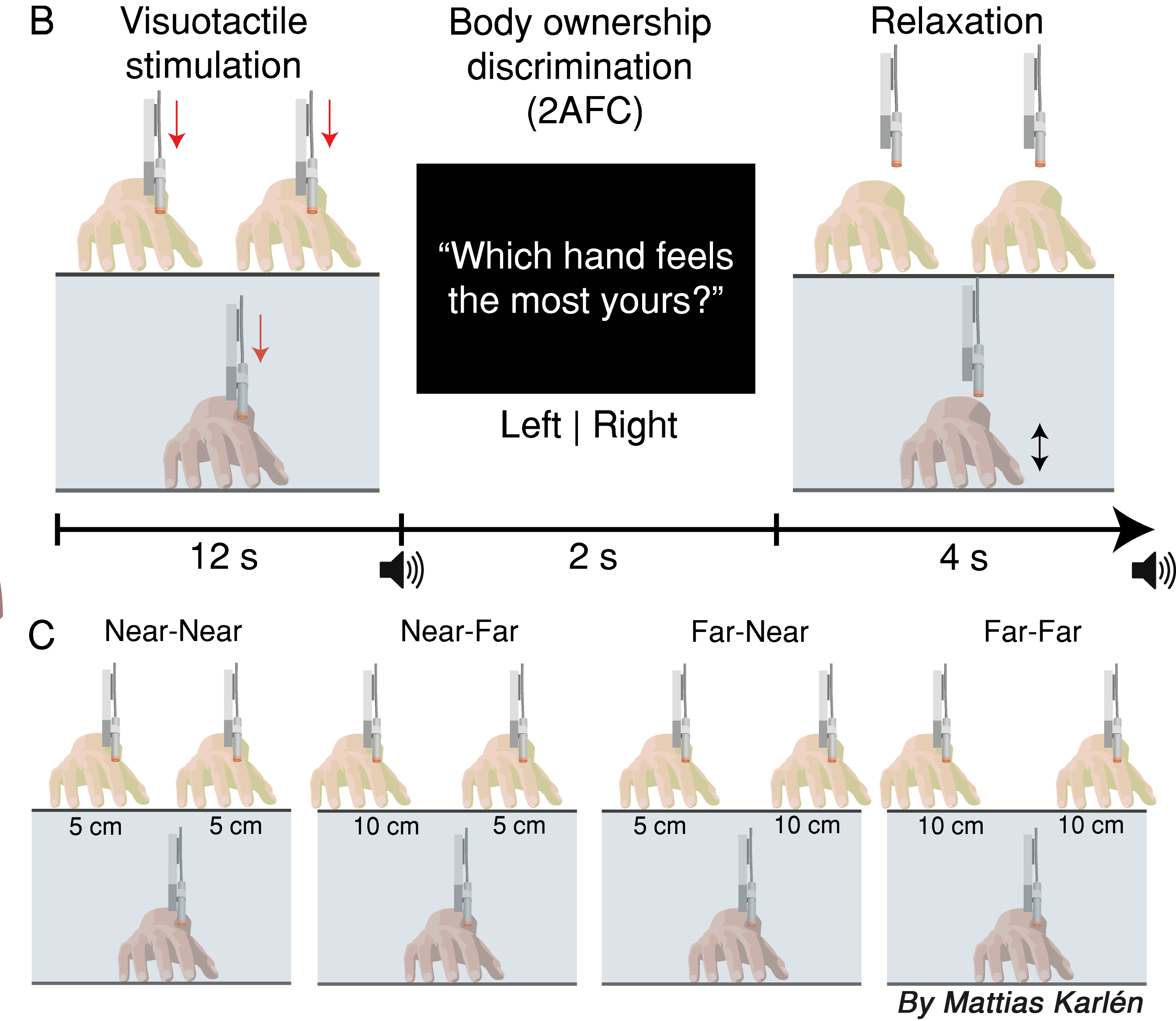
Summary: Perceiving what constitute our body is essential to act upon what is around us and to protect our physical integrity. This perception of body parts as one’s own is called body ownership. Body ownership requires the integration of inputs from different sensory modalities such as vision, touch and proprioception, together with a priori knowledge about what the body looks and feels like. Importantly, we are able to perceive stable body ownership despite the intrinsic noise affecting every sensory signal, which causes sensory uncertainty. This project ‘Uncertain Body’ proposes to investigate how this sensory uncertainty impact the multisensory integration process involved in body ownership by developing a new behavioral psychophysics paradigm, and combining this with state-of-the-art neuroimaging and computational approaches. To this end, we developped discrimination task based on the so called ‘rubber hand illusion’ where the participants have to decide which of two presented rubber hands that feels more like their own hand. The rubber hand illusion is a multisensory illusion that can be used to experiment with body ownership: when looking at a rubber hand being stroked in the same way as strokes are delivered to the real hand, which is hidden, the participant starts to feel that the rubber hand is his or her own hand. In our psychophysics paradigm two rubber hands are presented instead of one and touched in combination with the real hand in various relevant conditions. We have three specific objectives: 1) To prove that our paradigm leads to a more precise and more sensitive measurement of body ownership; 2) To use this paradigm to test the efficiency of the Bayesian principles to predict how sensory noise impacts body ownership; to fulfill this objective we will test our paradigm under several condition of visual noise, manipulated through a head mounted display 3) To identify which cerebral areas associated with body ownership that respond specifically to sensory uncertainty and according to which computational principles thanks to our novel approach of body ownership combining psychophysics and fMRI decoding.